r.blaster مواقع السفع بالخردق الروبوتية
خط r.blaster هو مستقبل السفع بالخردق. استجابة للمتطلبات المتزايدة المتعلقة بتكرار عملية المعالجة وصعوبات الوصول إلى موظفين مؤهلين، ومع الأخذ في الاعتبار العبء الضريبي المتزايد المرتبط بتوظيف العمال، قمنا بتطوير خط r.blaster – الأجهزة التي يكون فيها الروبوت مسؤولاً عن إجراء عملية المعالجة.
r.blaster مواقع السفع بالخردق الروبوتية
تم تصميم سلسلة r.baster من أجل معالجة آلية دقيقة:
- سفع انتقائي بالخردق؛
- طرق بكريات؛
- سفع بالخردق من عناصر ذات أشكال معقدة؛
- سفع بالخردق من عناصر متسلسلة مع تحكم دقيق بمعلمات العملية.
سلسلة r.blaster هي:
- إمكانية عمل مع نوعين مختلفين من المواد الكاشطة في جهاز واحد (تغيير تلقائي)؛
- إمكانية التحكم بدقة بسبعة معلمات عملية مختلفة؛
- إمكانية المعالجة الانتقائية لأسطح مختارة.
يعتبر خط r.blaster فريدًا من نوعه لأننا نجمع بين سنوات عديدة من الخبرة في مجال السفع الرملي الهوائي وكفاءة عالية في مجال الروبوتية. بصفتنا الشركة الوحيدة في هذا المجال في السوق البولندية، نحن الشريك الرسمي ومكامل مصنع الروبوتات الصناعية – شركة Nachi.
هذا يضمن أن محطة السفع بالخردق الآلية التي نوفرها ستكون حلًا تكنولوجيًا متكاملًا وشاملًا، وليس مجرد روبوت مجهز بفوهات السفع بالخردق.
ينطبق نطاق التكامل على كل من تثبيت الروبوت وبرمجته المناسبة للحفاظ على معلمات المعالجة الثابتة، ولكن أيضًا على حماية مناسبة من تأثير كاشط للمادة الكاشطة والتوجيه السليم لخطوط السفع. تترجم المعرفة العميقة في مجال المعالجة إلى تكوين مناسب للجهاز التكنولوجي نفسه وكذلك الأجهزة الطرفية مثل عربات التزويد، الناقلات، إلخ.
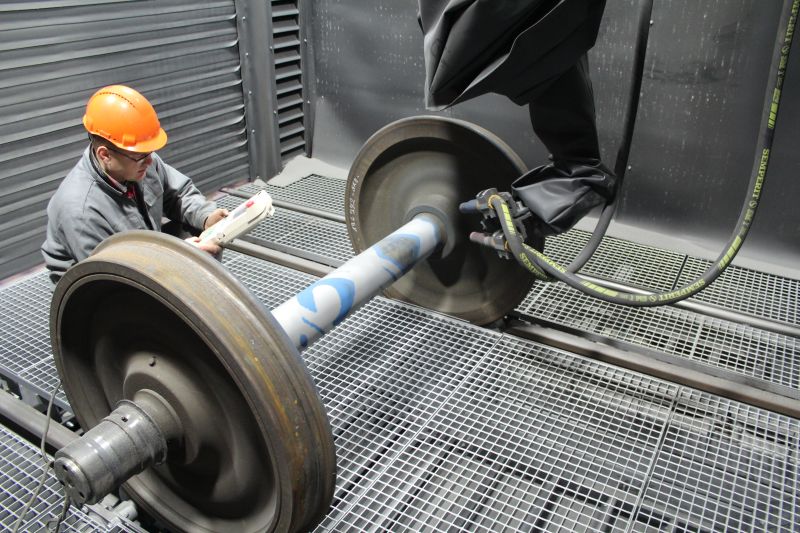
يمكن لأجهزة r.blaster العمل على أساس نسخة يقوم فيها الروبوت بتحريك فوهة السفع، أو تكون الفوهة ثابتة ويحرك الروبوت القطعة المعالجة. بناءً على احتياجات العملية هناك أيضًا إمكانيات مختلفة لموقع الروبوت نفسه.
الحل القياسي هو عبارة عن جهاز يوضع فيه الروبوت خارج حجرة العمل ويُفصل عن مساحة العمل بمريلة خاصة للحماية. نحن قادرون أيضًا على توفير حل يكون فيه الروبوت داخل حجرة السفع. ومع ذلك، بالنسبة للعناصر الكبيرة الحجم، من الممكن تزويد الروبوت بدرجة إضافية من الحرية لزيادة مساحة عمله.
كان أحد أهداف إنشاء خط r.blaster هو تسهيل عمل المشغل قدر الإمكان، حيث يمكنه مراقبة العملية من خارج الجهاز في ظروف مريحة، مع الحفاظ على التحكم الكامل من معالم المعالجة وأرشفتها. هذا يضمن جودة العناصر المطلوبة، مع جمع البيانات التي تسمح بإجراء العملية بشكل أكثر كفاءة واقتصادية.
يمكن إجراء برمجة الروبوت نفسه بطريقتين – بشكل مباشر من خلال الإشارة إلى النقاط المتتالية التي يتحرك بينها الروبوت أو عن طريق تحفيز العملية في برنامج خاص يعمل على أساس هندسة CAD للعنصر، ثم تصدير البرنامج إلى وحدة تحكم الجهاز. ونمكن من تكامل الجهاز مع شبكة الشركة، وبفضل ذلك يمكن للتقني إرسال البرنامج مباشرة من مستوى مكتبه إلى الجهاز.
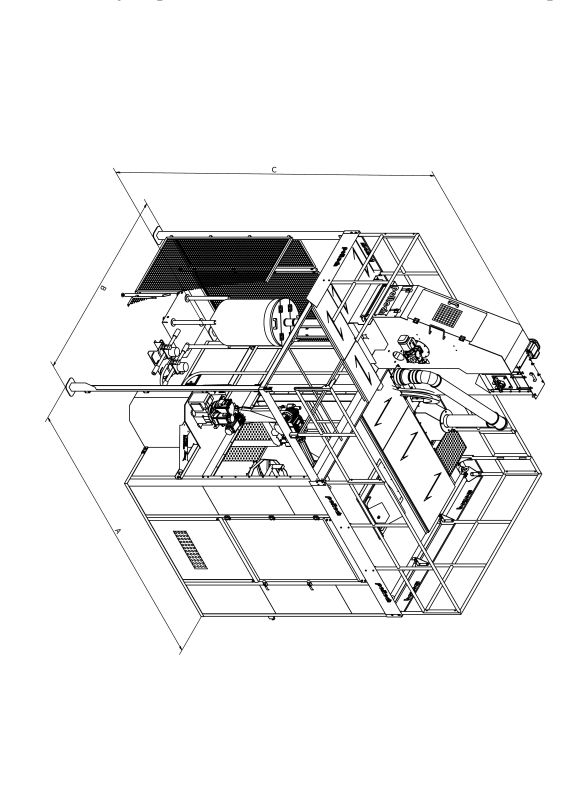
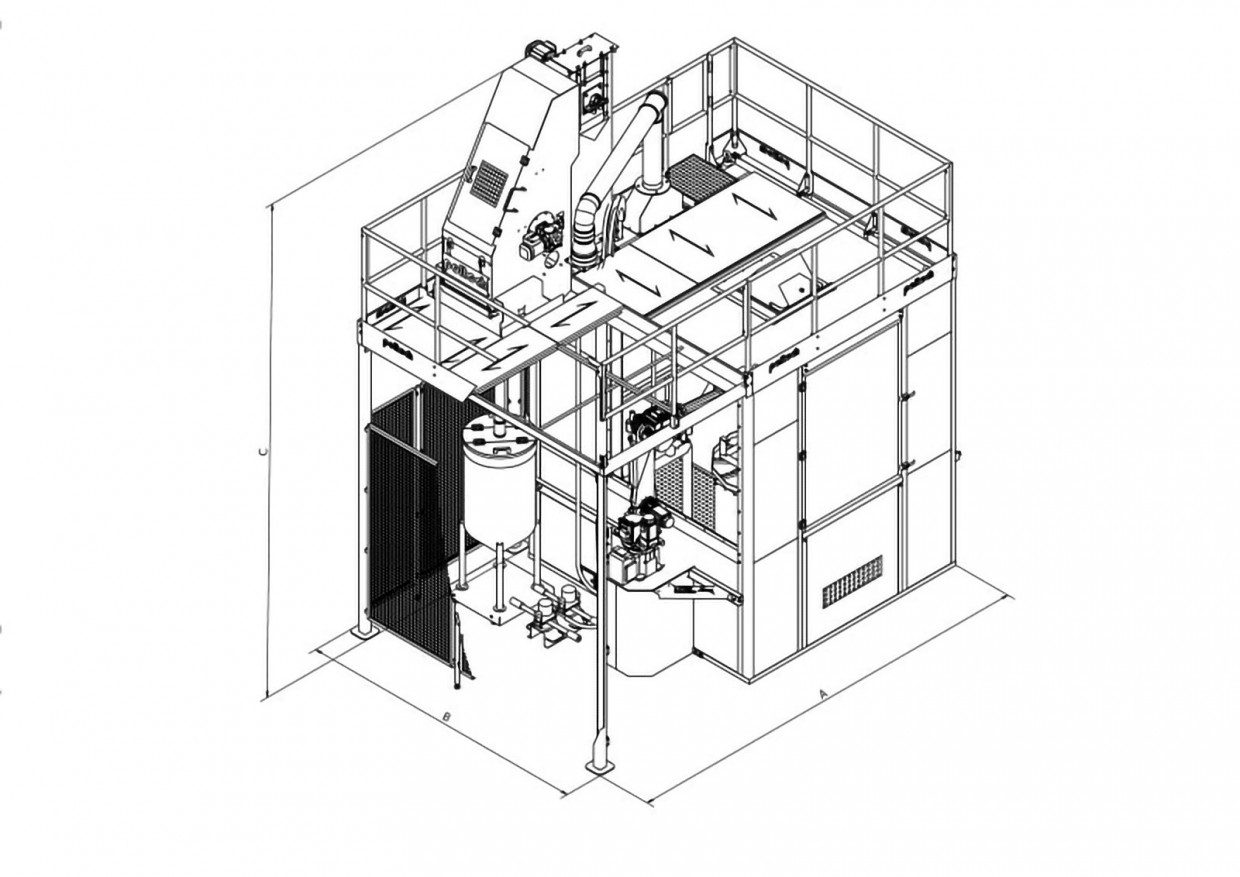
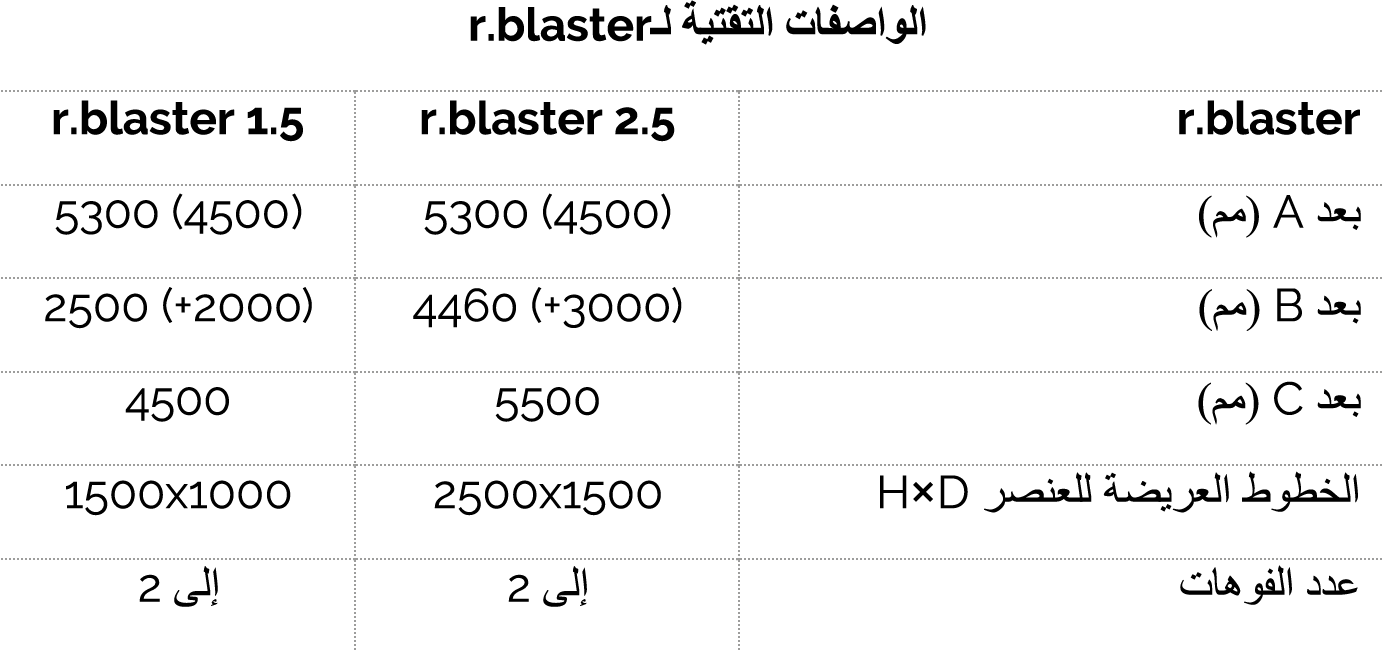
لقد قمنا بتصميم قمرتي r.blaster قياسيتين لعناصر ذات الأبعاد الأكثر نموذجية. تم عرض معلمات الأجهزة في الجدول أدناه. بناءً على تعقيد العملية التي يتم تنفيذها والمتطلبات التكنولوجية للمعالجة نفسها، يمكن اختيار واحد من حلين قياسيين أو طلب حل محضّر خصيصًا للاحتياجات الفردية.
اتصل بقسم مبيعاتنا للمزيد من المعلومات.